
Robotic insects, like the Entomopter developed at the Georgia Institute of Technology, could give us an unprecedented look at our world.
The U.S. Department of Defense is spending millions of dollars to develop these MAVs. They are the perfect way to keep soldiers out of harm's way during reconnaissance missions. Today, gathering reconnaissance during battle typically involves putting either small teams of soldiers or large aircraft in harm's way. At the same time, satellite imagery is not immediately accessible by a ground soldier.
Robotic insects, like the Entomopter developed at the Georgia Institute of Technology, could give us an unprecedented look at our world.
The Defense Advance Research Projects Agency (DARPA) is funding several research teams to develop MAVs no larger than 6 inches (15 cm) in length, width and height. These tiny aircraft will be an order of magnitude smaller than any unmanned aerial vehicle (UAV) developed to date. One class of these MAVs is being designed to mimic the flying motions of certain insects, including flies, bees and dragonflies.
"Engineers say they can prove that a bumblebee can't fly," said Michael Dickinson, a biologist at the University of California, Berkeley. "And if you apply the theory of fixed wing aircraft to insects, you do calculate that they can't fly. You have to use something different."
Dickinson is part of the Micromechanical Flying Insect (MFI) Project, which is developing small flying robots using the flight principles of insects. The project is in cooperation with DARPA. The MFI Project is proposing a robotic insect that is about 10 to 25 millimeters (0.39 to 0.98 inches) in width, which is much smaller than the DARPA's size limit of 6 inches (15 cm), and will use flapping wings to fly. The project's goal is to recreate the flight of a blowfly. Click here to see a video (requires RealPlayer) of how researchers are studying insect flight.

A model of a micromechanical flying insect sitting in the palm of a Berkeley researcher's hand
If you read the article How Airplanes Work, you know that airplanes generate lift due to the air travelling faster over the top of the wing than along the bottom of the wing. This is called steady-state aerodynamics. The same principle cannot be applied to flies or bees, because their wings are in constant motion.
"Unlike fixed-wing aircraft with their steady, almost inviscid (without viscosity) flow dynamics, insects fly in a sea of vortices, surrounded by tiny eddies and whirlwinds that are created when they move their wings," said Z. Jane Wang, a physicist at Cornell University's College of Engineering. An eddy is whirlpool of air that is created by the wing, and the air in the eddy is flowing in the opposite direction of the main current of air.
The vortices created by insect wings keep the insects aloft. Dickinson's group outlines these three principles to explain how insects gain lift and stay airborne:
"It would be real spiffy if we could exploit these mechanisms, too, by building an insect robot. But you can't build them now based on known principles -- you have to fundamentally rethink the problem," Dickinson said. In the next section, you will learn how researchers are taking these principles and applying them to the creation of robotic flying insects.
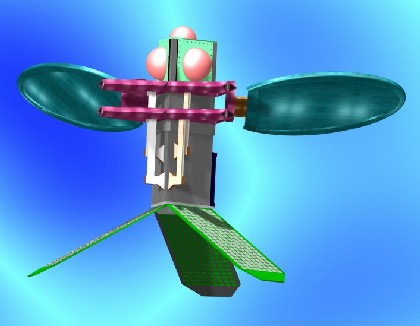
Let's look at the basic parts of the Entomopter:
The Entomopter is powered by a chemical reaction. A monopropellant is injected into the body, causing a chemical reaction that releases a gas. The gas pressure that builds up pushes a piston in the fuselage. This piston is connected to the pivotally coupled wings, causing them to flap rapidly. Some of the gas is exhausted through vents in the wing and can be used to change the lift on either wing so the vehicle can turn. Currently, the Entomopter has a 10-inch (25-cm) wingspan. "The next step is to shrink the RCM device down to bug size," said Michelson.
In a vehicle the size of a house fly, every part must perform multiple tasks. For example, a radio antenna attached to the back of the vehicle may also act as a stabilizer for navigation. The legs could store fuel for adjustment of the vehicle's weight and balance during flight.
An artist's concept of the completed micromechanical flying insect being developed at Berkeley
In order to build the MFI, researchers performed experiments to learn how flies fly. One of the experiments involved building a pair of 10-inch (25-cm) robotic wings, called Robofly, which was made of Plexiglass and modeled after the wings of a fruit fly. The wings were immersed in a tank of mineral oil, which forces them to react like smaller, 1-millimeter-long fruit-fly wings beating rapidly in the air. Six motors -- three on each wing -- moved the wings back and forth, up and down and in a rotary motion. Sensors were attached to measure the force of the wings.
Eventually, the Robofly will be shrunk down to a stainless-steel microrobotic fly that is 10 to 25 millimeters (0.4 to 1 inch) in width and weighs roughly 43 milligrams (0.002 ounces). The wings will be made of a thin Mylar film. Solar power will run a piezoelectric actuator that will push the wings to flap. The robot's thorax will transform piezoelectric-actuator deflections into the large wing stroke and rotation required to achieve flight.
As of May 2001, the MFI has not yet flown. It is still in its early development stages. The next step will be to add a flight-control unit and communication unit for remote control. The researchers say that they are working on enabling controlled hovering by way of optical sensing and an onboard gyroscope.
The military would like an MAV that has a range of approximately 6.2 miles (10 km), flies in day or night and can stay airborne for approximately one hour. DARPA officials say that the ideal speed for an MAV is 22 to 45 mph (35.4 to 72.4 kph). It would be controlled from a ground station, which would employ directional antennas and maintain continuous contact with the MAV.
Robotic flies could also be well-suited as a new generation of interplanetary explorers. The Georgia Tech Research Institute (GTRI) has received funding from the NASA Institute for Advanced Concepts (NIAC) to study the idea using the Entomopter as a flying Mars surveyor. In March 2001, NASA funded the second phase of the study in anticipation of future Mars micromissions.
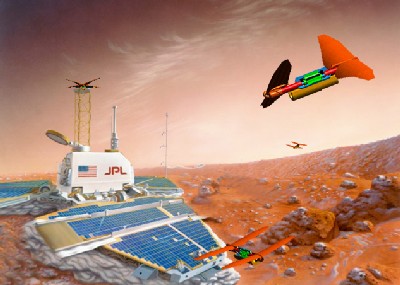
An artist's concept of a team of Entomopters exploring Mars
Entomopters offer several advantages over larger surveyors. They would be able to land, takeoff, hover and perform more difficult maneuvers in flight. Their ability to crawl and fly also gives them an advantage in exploring other planets. Most likely, NASA would send dozens of these surveillance vehicles to explore other planets. Entomopter developer Rob Michelson said that the Mars version of the Entomopter would have to be sized up to have a wingspan of about 1 meter in order to fly in the thin atmosphere of Mars.
Researchers say that these tiny flying robots would also be valuable in the aftermath of natural disasters, such as earthquakes, tornadoes or landslides. Their small size and ability to fly and hover make them useful for searching for people buried in rubble. They could fly between crevices that humans and larger machines are unable to navigate. Other uses include traffic monitoring, border surveillance, wildlife surveys, power-line inspection and real-estate aerial photography.
Spy flies are yet another example of how technology is aiding humans in performing dangerous tasks, allowing the humans to stay out of harm's way. Military reconnaissance, searching for earthquake victims and traveling to other worlds are all hazardous activities -- flying microrobots would allow us to accomplish these tasks without actually being there.